Research
Obscuring Objectives with Pareto-Optimal Privacy-Aware Trajectories in Multi-Robot Coverage
Abstract:
This paper proposes an algorithm for generating Pareto-optimal privacy-aware trajectories for multi-robot coverage. Our approach utilizes a genetic algorithm to generate a set of modified trajectories for a team of robots that wishes to obscure its goal from an observer. A novel velocity-constrained crossover algorithm ensures all child trajectories are feasible for a holonomic vehicle. The Pareto front of generated trajectories allows a team to select an allowable trade-off between privacy and coverage cost given within their task. Simulation results demonstrate the performance of our algorithm in Voronoi-based coverage control. We show our approach successfully obscures the objective from our proposed observer.
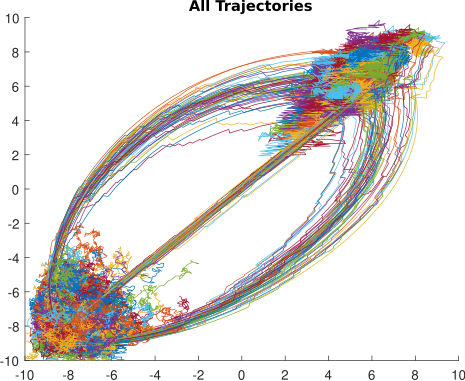
Trajectory Population After 8 Generations
To learn more, please feel free to watch the video below or read the paper here!
