Research
My research aims to advance robot autonomy by improving their ability to reason about complex scenarios through the use of efficient algorithms. My interest in robotics research began when I was brought on to a research team during my undergraduate studies performing wildlife surveys with fixed wing UAVs. Since then, I have ventured into multiple robotics fields, from multi-objective optimization problems to localization and mapping. While my research has a broad range of subjects and applications, there are common themes we can find in the key ideas of allowing robots to make more intelligent decisions with limited information. Please explore my publications listed below to learn more!
Publications:
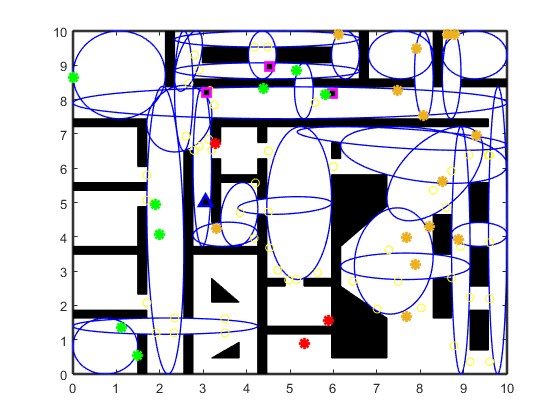
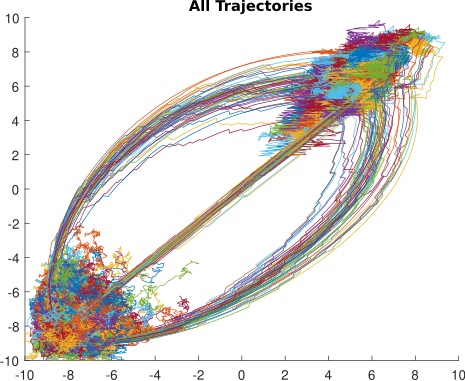
Heterogeneous Exploration and Monitoring with Online Free-Space Ellipsoid Graphs
In this project, we proposed a heterogenous teaming solution to the problem of exploration and monitoring of tasks in unknown, non-convex environments. By having agile agents generate a Free-Space Ellipsoid Graph representation of the environment online during exploration, our slower and more capable agents could then generate trajectories to simultaneously and collaboratively service all discovered tasks.
Published in: Proceedings of the 2025 IEEE International Conference on Robotics and Automation

Gathering Data from Risky Situations with Pareto-Optimal Trajectories
In this project, we proposed a formulation for the risk-aware path planning problem that utilizes multi-objective optimization to dynamically plan trajectories that maintain safety while satisfying multiple complex task specifications. We then propose two sampling-based techniques to generate Pareto frontiers of trajectories and a method for autonomously selecting the best candidate solution, depending on current values of risk and objective trade-off.
Published in: Proceedings of the 2024 IEEE International Conference on Robotics and Automation
Obscuring Objectives with Pareto-Optimal Privacy-Aware Trajectories in Multi-Robot Coverage
In this project, we demonstrate that some traditional and optimal control methods can inadvertently reveal information about an autonomous agent’s objectives, resulting in a loss of privacy for sensitive applications. We then propose a novel velocity-constrained genetic crossover that allows us to use an evolutionary algorithm to create a set of modified team trajectories that maintain objective privacy from a malicious observer, at the cost of some optimality.
Published in: Proceedings of the 2023 IEEE International Conference on Robotics and Automation
Under Review:
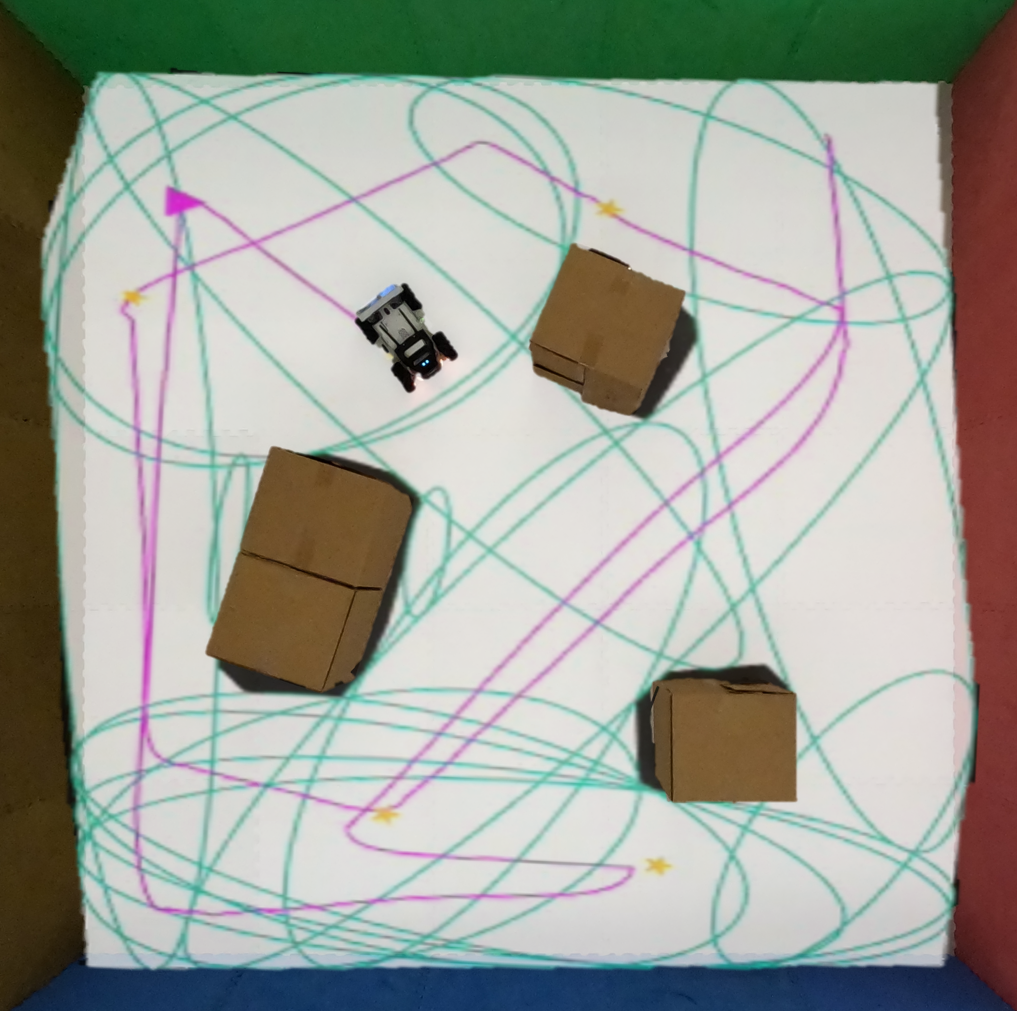
Free-Space Ellipsoid Graphs for High-Level Coordination in Real-World Environments
In this project, we propose multiple algorithms for efficiently generating Free-Space Ellipsoid Graphs with arbitrarily complete coverage for the high-level coordination of autonomous teams. Additionally, we propose a new pipeline that allows for Free-Space Ellipsoid Graphs to be generated in conjunction with common SLAM methods, allowing for better semantic and segmented understanding of the environment for downstream planning. Finally, we use our methods to perform experiments with heterogeneous multi-agent systems in real-world environments that we map with a 2D scanning LiDAR.
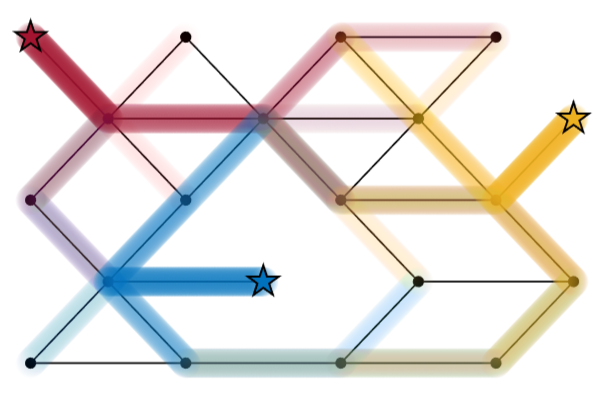
Go With The Flow: Understanding Coexistence Between Multi-Agent Teams in Shared Environments
In this project, we introduce a method for quantifying the coexistence between multi-agent teams operating in shared environments as a multi-commodity flow. With this method, we approximate the utilization of shared resources that arise from capacity limitations and costs of navigation for each team using only the observed agent positions, maintaining team level privacy without the need for inter-team communications. The introduced observed approximate shared resource utilization allows us to explore methods for ensuring equitable usage of shared resources between cooperative teams, and methods for improving overall coexistence between non-cooperative teams.
